Setting Up a Robot Car with an Ultrasonic Sensor and Servo Motor for Obstacle Avoidance
Requirements:
- Arduino Board (e.g., Uno)
- Adafruit Motor Shield (AFMotor library)
- Servo Motor (for rotating ultrasonic sensor)
- Ultrasonic Sensor (e.g., HC-SR04)
- 4 DC Motors (for robot movement)
- Jumper Wires and Battery Pack (to power motors and Arduino)
- Arduino IDE (Installed on your computer)
Step-by-Step Guide:
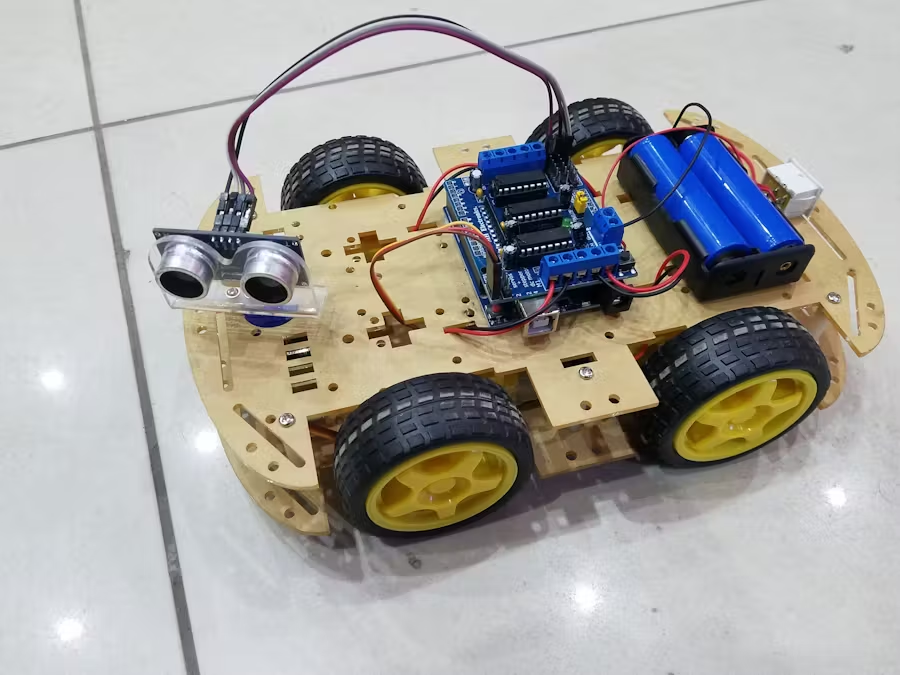
Step 1: Assemble the Hardware
- Attach the Motor Shield to the Arduino board by aligning and pressing it down onto the pins.
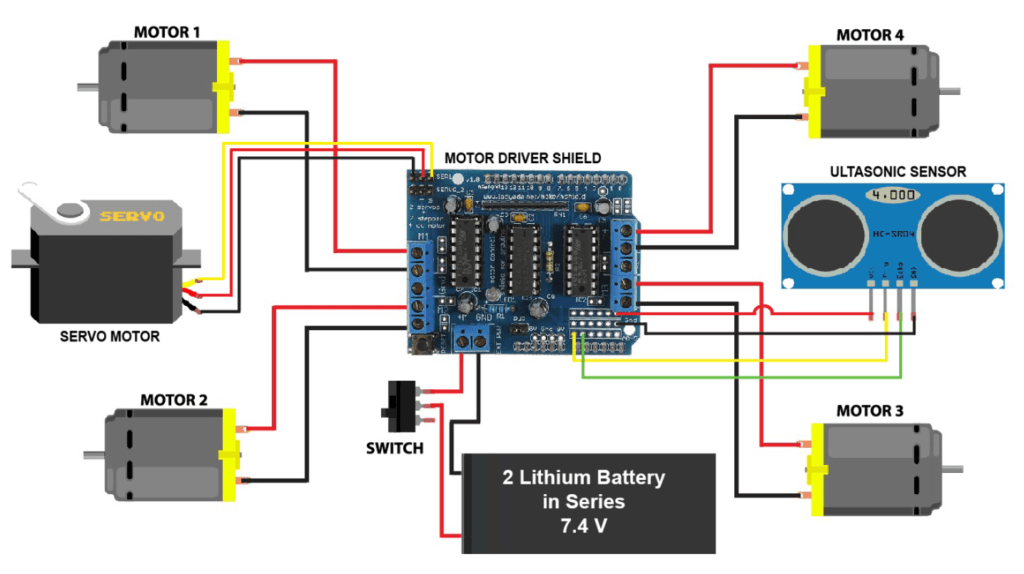
- Connect the DC Motors to the motor shield:
- Connect the front-left motor to M1.
- Connect the back-left motor to M2.
- Connect the front-right motor to M3.
- Connect the back-right motor to M4.
- Mount the Ultrasonic Sensor on the Servo:
- Fix the ultrasonic sensor to the servo motor so it can rotate left and right.
- Secure both to the front of the car.
- Connect the Servo Motor to Pin 10 on the motor shield.
- Wire the Ultrasonic Sensor:
- Connect trigPin to A0 on the motor shield.
- Connect echoPin to A1 on the motor shield.
Step 2: Upload the Code to Arduino
- Open the Arduino IDE on your computer.
- Install necessary libraries if not already installed:
- Go to Sketch > Include Library > Manage Libraries…
- Search for AFMotor and install it.
- Search for Servo if it’s not already included.
- Copy and paste the code into the Arduino IDE.
- Connect the Arduino to your computer via USB.
- Select the correct Board and Port in the Tools menu.
- Click Upload to upload the code to the Arduino.
Step 3: Download and Add Arduino Libraries
1 . Download the Library Files:
- Go to the download section on this website and download the AFMotor.zip and Servo.zip library files.
- Save the downloaded files in a folder of your choice.
2. Add the Libraries in Arduino IDE:
- Open the Arduino IDE.
- Go to Sketch > Include Library > Add .ZIP Library… in the top menu.
- Select the downloaded library files (AFMotor.zip and Servo.zip) and click Open.
- Arduino IDE will confirm if the libraries are successfully added.
3. Confirm Library Installation:
- In your code, add
#include <AFMotor.h>and#include <Servo.h>at the beginning. - Upload the code to Arduino. If no error appears, the libraries are installed correctly.
Step 3: Power Up the Car
Once the code is uploaded, disconnect the USB cable.Power the car using a battery pack. Ensure the motor shield can handle the voltage of your battery.The car should now be ready to move and avoid obstacles.
Digaram
Cod
#include <AFMotor.h>
#include <Servo.h>
Servo servo;
AF_DCMotor LF(1);
AF_DCMotor LB(2);
AF_DCMotor RF(3);
AF_DCMotor RB(4);
#define trigPin A0
#define echoPin A1
void setup() {
servo.attach(10); // Attach the servo
pinMode(trigPin, OUTPUT); // Declare "trigPin" as "Output Pin".
pinMode(echoPin, INPUT); // Declare "echoPin" as "Input Pin".
Serial.begin(9600); // Start serial communication
}
void loop() {
float distance = search(); // Measure distance
Serial.print("Distance = ");
Serial.println(distance);
// Adjust to avoid zero distance readings
if (distance > 0) {
if (distance <= 25) {
RobotStop();
delay(200);
if (distance <= 30) { // If obstacle found within 30 cm
RobotStop(); // Robot stops
delay(500);
servo.write(5); // Move servo to 5 degrees
delay(500);
float RightDistance = search(); // Measure right distance
delay(100);
servo.write(180); // Move servo to 180 degrees
delay(500);
float LeftDistance = search(); // Measure left distance
delay(100);
servo.write(90); // Reset servo to center position
delay(300);
// Decide which direction to turn based on distances
if (LeftDistance > RightDistance) {
Motor_Speed(140);
RobotBackward();
delay(300);
RobotStop();
delay(100);
RobotLeft();
delay(500);
RobotStop();
delay(100);
} else {
Motor_Speed(140);
RobotBackward();
delay(300);
RobotStop();
delay(100);
RobotRight();
delay(500);
RobotStop();
delay(100);
}
}
} else if (distance <= 60) {
Motor_Speed(170);
RobotForward();
} else {
Motor_Speed(200);
RobotForward();
}
} else {
Serial.println("Invalid reading");
RobotStop(); // Stop the robot if distance is invalid
}
delay(100); // Add a small delay before the next loop iteration
}
float search() {
float duration = 0.00;
float CM = 0.00;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH, 30000); // Timeout after 30ms
CM = (duration / 58.82); // Convert time to distance in cm
// Return 0 if distance is invalid
if (CM > 0 && CM < 400) { // Range check
return CM;
} else {
return 0; // Invalid distance reading
}
}
void RobotForward() {
LF.run(FORWARD);
RF.run(FORWARD);
LB.run(FORWARD);
RB.run(FORWARD);
}
void RobotBackward() {
LF.run(BACKWARD);
LB.run(BACKWARD);
RF.run(BACKWARD);
RB.run(BACKWARD);
}
void RobotLeft() {
LF.run(BACKWARD);
LB.run(BACKWARD);
RF.run(FORWARD);
RB.run(FORWARD);
}
void RobotRight() {
LF.run(FORWARD);
LB.run(FORWARD);
RF.run(BACKWARD);
RB.run(BACKWARD);
}
void RobotStop() {
LF.run(RELEASE);
LB.run(RELEASE);
RF.run(RELEASE);
RB.run(RELEASE);
}
void Motor_Speed(int mtrspd) {
LF.setSpeed(mtrspd);
LB.setSpeed(mtrspd);
RF.setSpeed(mtrspd);
RB.setSpeed(mtrspd);
}Hope You’ve Successfully Built Your Obstacle-Avoiding Robot Car!
If you follow all the steps carefully, I am confident that your obstacle-avoiding robot car will navigate around obstacles successfully. This project is an excellent choice for beginners, providing a hands-on introduction to robotics. Not only will it enhance your understanding of how an obstacle-avoiding robot car operates, but it will also give you practical experience in assembling and programming a functional robot. Dive in and watch your creation come to life!





