How the 3-Mode Bluetooth Robot Car Functions
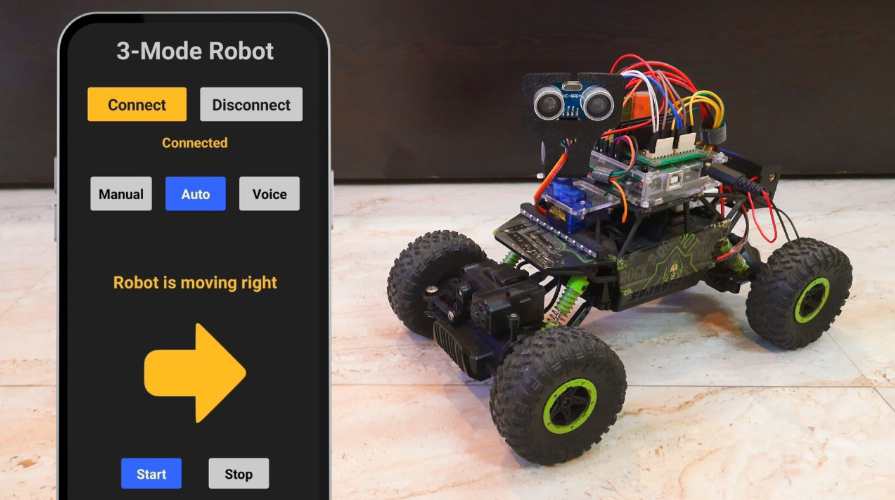
The 3-mode Bluetooth Robot Car operates in three versatile modes—Manual, Automatic, and Voice. It can be controlled through a custom Android app built with MIT App Inventor, which communicates wirelessly with the car via Bluetooth. Each mode brings unique capabilities, making the car adaptable to various applications.
1. Manual Mode
In Manual mode, users control the car using buttons within the Android app. The app offers three motor speed levels (low, medium, and high), enabling smooth speed adjustments through PWM (Pulse Width Modulation). The robot moves based on real-time user commands, making this mode ideal for precise navigation.
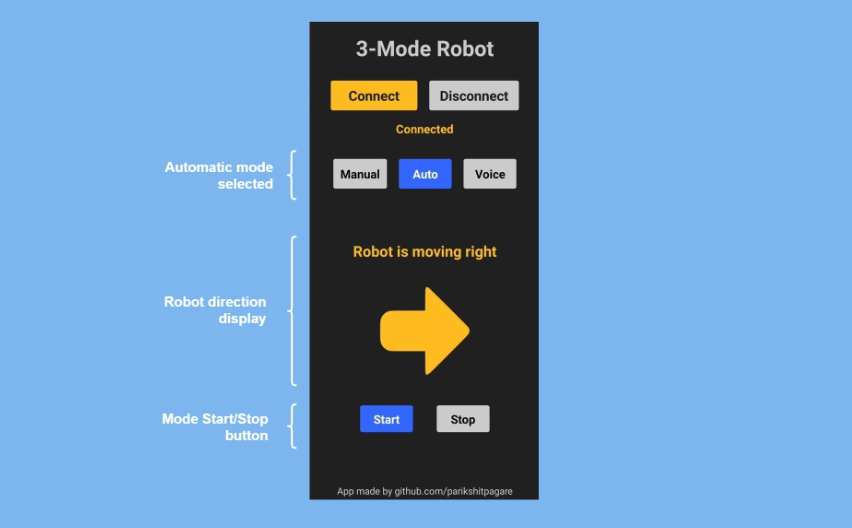
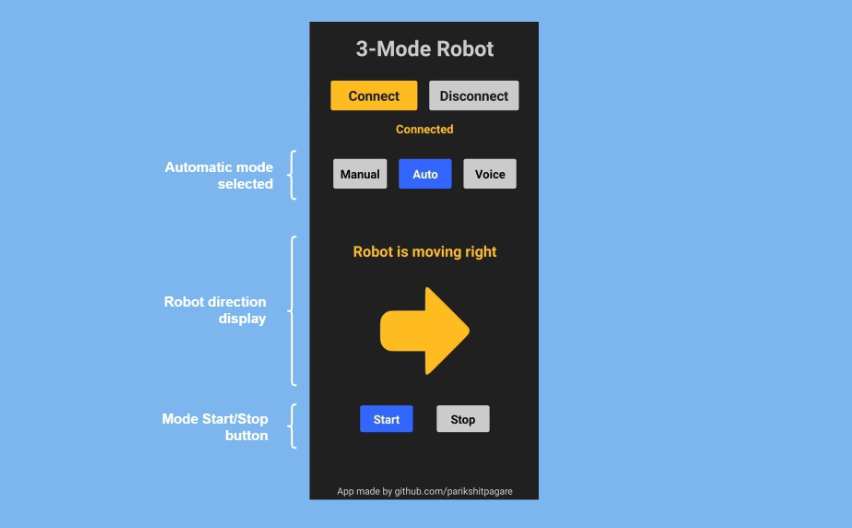
2. Automatic Mode
Automatic mode enables the car to function autonomously. An ultrasonic sensor helps it detect obstacles and adjust its direction accordingly. The app shows the direction of movement, allowing users to monitor its actions. The ultrasonic sensor constantly scans the surroundings to ensure safe navigation, making decisions about moving left, right, or forward based on detected objects’ distances.
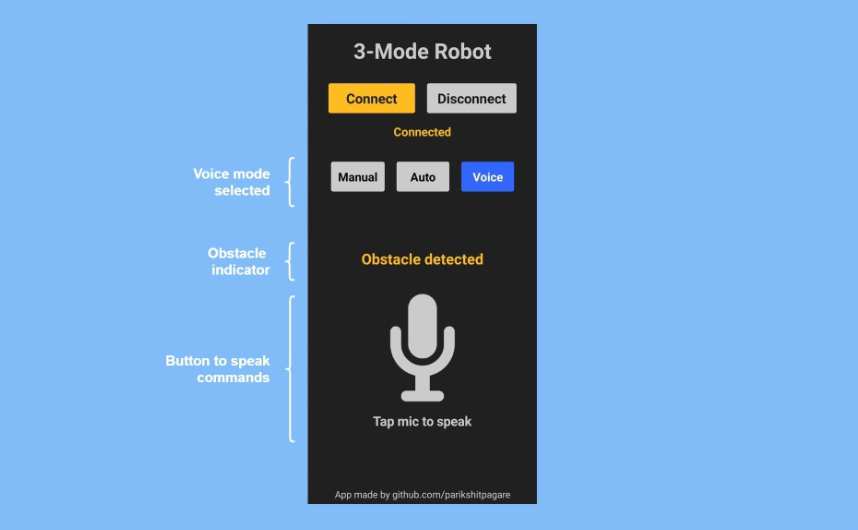
3. Voice Mode
In Voice mode, users control the car through voice commands, utilizing Google Speech Recognizer in the app. Before each movement, the car checks for obstacles and proceeds only if the path is clear. If an obstacle is detected, the car stops and displays “Obstacle Detected” on the app, ensuring safety and responsiveness to commands.
Setting Up the 3-Mode Bluetooth Robot Car
Components Needed
- Robot chassis
- Geared DC motors
- Ultrasonic sensor (HC-SR04)
- Arduino Uno Rev3
- SG90 Micro Servo
- HC-05 Bluetooth module
- L298N Motor Driver Dual H-Bridge
- 18650 Lithium batteries (2 units)
Required Tools
- Soldering kit
- Arduino IDE 2.0 (for programming the Arduino)
- MIT App Inventor 2 (for building the Android app)
Setup Steps
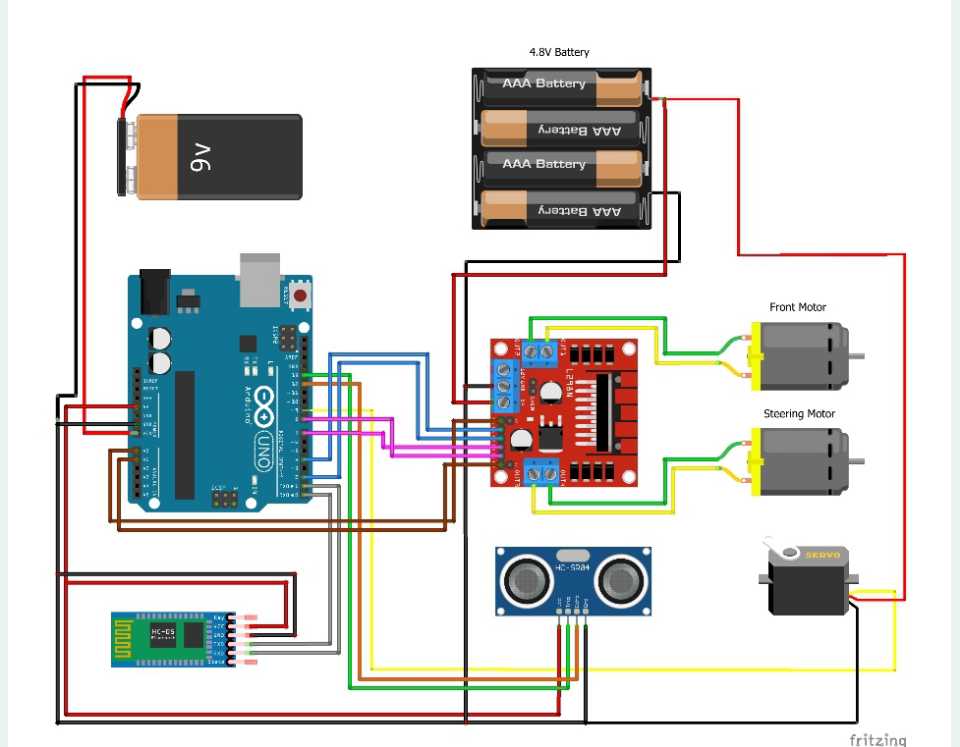
- Assembling the Robot Chassis
Mount the DC motors, motor driver, and other components onto the chassis as per the design layout. - Wiring the Components
- Connect the HC-SR04 ultrasonic sensor to the Arduino for distance measurement.
- Attach the SG90 servo motor to the front for directional control in autonomous mode.
- Use the L298N motor driver to control the DC motors, connecting it to Arduino’s digital pins.
- Attach the HC-05 Bluetooth module for wireless communication between the Android app and the robot.
- Programming the Arduino
- Open Arduino IDE, and install necessary libraries (e.g., Servo, SoftPWM).
- Upload the provided code to the Arduino Uno, enabling mode switching and PWM-based speed control.
- Developing the Android App
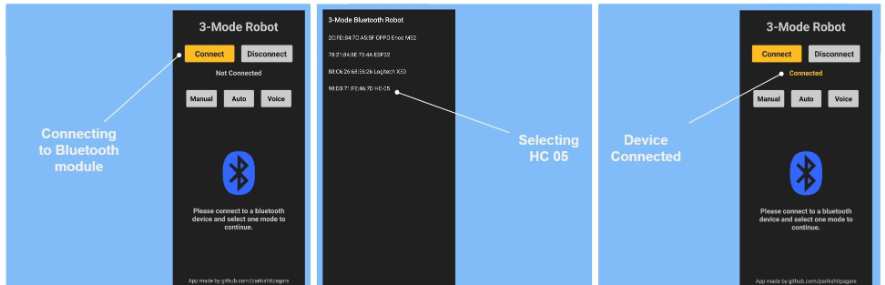
- In MIT App Inventor 2, create a new project and design the app interface, adding buttons for manual control, voice recognition, and connection settings.
- Pair the app with the HC-05 Bluetooth module, enabling communication with the robot.
- Testing the Robot
- Pair the Android device with the HC-05 Bluetooth module.
- Open the app, choose a mode, and test the robot’s functionality in Manual, Automatic, and Voice modes. Ensure that the car responds correctly and displays directional and obstacle data in the app.


Daigram
#include <Servo.h>
#include "SoftPWM.h"
/* Motor pins */
#define motorMovement_1 4
#define motorMovement_2 2
#define motorMovement_pwm A0
#define motorDirection_1 7
#define motorDirection_2 8
#define motorDirection_pwm A1
/* Ultrasonic sensor */
#define trigger 12
#define echo 13
Servo ultrasonicServo;
char input;
volatile bool flag = 1;
uint8_t pwm;
volatile float duration;
volatile float distance;
volatile float leftDistance;
volatile float rightDistance;
const float safeDistance = 40.0;
void setup() {
/* Setup baud rate for serial communication */
Serial.begin(9600);
delay(100);
/* Setup DC motors */
pinMode(motorMovement_1, OUTPUT);
pinMode(motorMovement_2, OUTPUT);
pinMode(motorMovement_pwm, OUTPUT);
pinMode(motorDirection_1, OUTPUT);
pinMode(motorDirection_2, OUTPUT);
pinMode(motorDirection_pwm, OUTPUT);
/* Setup servo motor */
ultrasonicServo.attach(9);
ultrasonicServo.write(90);
/* Setup ultrasonic sensor pins */
pinMode(trigger, OUTPUT);
pinMode(echo, INPUT);
/* Setup DC motor pwm */
SoftPWMBegin(SOFTPWM_NORMAL);
SoftPWMSet(motorMovement_pwm, 50);
SoftPWMSet(motorDirection_pwm, 0);
}
void loop() {
if (Serial.available() > 0) {
input = Serial.read();
/* Manual mode */
if (input == 'G' || input == 'H' || input == 'I' || input == 'J' || input == 'K') {
flag = 1;
manual();
}
/* Automatic mode */
else if (input == 'A') {
flag = 1;
ultrasonicServo.write(90);
automatic();
}
/* Voice mode */
else if (input == 'F' || input == 'B' || input == 'L' || input == 'R' || input == 'S') {
flag = 1;
voice();
}
/* Change PWM values */
else if (input == 'X' || input == 'Y' || input == 'Z') {
pwmChange();
}
}
}
/* Reading char 'O' on serial for stopping current mode */
void modeChange() {
if (Serial.available() > 0) {
input = Serial.read();
if (input == 'O') {
flag = 0;
reset();
}
}
}
/* Stopping DC motors and bringing servo motor to original position */
void reset() {
digitalWrite(motorMovement_1, LOW);
digitalWrite(motorMovement_2, LOW);
digitalWrite(motorDirection_1, LOW);
digitalWrite(motorDirection_2, LOW);
ultrasonicServo.write(90);
SoftPWMSet(motorMovement_pwm, 50);
while (true) {
loop();
}
}
void manual() {
if (input == 'G') {
forward();
}
else if (input == 'H') {
backward();
}
else if (input == 'I') {
left();
}
else if (input == 'J') {
right();
}
else if (input == 'K') {
stop();
}
}
void automatic() {
findDistance();
while (true) {
if (distance > safeDistance) {
Serial.print("Forward?");
setForward();
findDistance();
}
else if (distance < safeDistance) {
stop();
delay(300);
servoScan();
}
}
}
/* Finding distances on both sides using servo motor and ultrasonic sensor*/
void servoScan() {
modeChange();
delay(100);
if (flag == 1) {
Serial.print("Scan?");
delay(100);
/* Finding distance on left side */
ultrasonicServo.write(180);
delay(100);
findDistance();
delay(300);
leftDistance = distance;
delay(300);
ultrasonicServo.write(90);
delay(100);
/* Finding distance on right side */
ultrasonicServo.write(0);
delay(100);
findDistance();
delay(300);
rightDistance = distance;
delay(300);
ultrasonicServo.write(90);
delay(100);
safeZone();
}
}
/* Comparing distances recieved after scanning by servo motor */
void safeZone() {
modeChange();
delay(100);
if (flag == 1) {
if ((leftDistance > rightDistance) && (leftDistance > safeDistance)) {
left:
setBackward();
delay(200);
setLeft();
findDistance();
while (true) {
if (distance > safeDistance) {
setForward();
findDistance();
}
else if (distance < safeDistance) {
goto stopA;
}
}
stopA:
stop();
delay(300);
servoScan();
}
else if ((rightDistance > leftDistance) && (rightDistance > safeDistance)) {
right:
setBackward();
delay(200);
setRight();
findDistance();
while (true) {
if (distance > safeDistance) {
setForward();
findDistance();
}
else if (distance < safeDistance) {
goto stopB;
}
}
stopB:
stop();
delay(300);
servoScan();
}
else if ((leftDistance && rightDistance) > safeDistance) {
goto right;
}
else if ((leftDistance && rightDistance) < safeDistance) {
setBackward();
delay(300);
servoScan();
}
}
}
void voice() {
if (input == 'F') {
voiceForward();
}
else if (input == 'B') {
voicebackward();
}
else if (input == 'L') {
voiceLeft();
}
else if (input == 'R') {
voiceRight();
}
else if (input == 'S') {
Serial.print("Stop?");
stop();
}
}
/* When voice input is "Forward" */
void voiceForward() {
ultrasonicServo.write(90);
delay(100);
findDistance();
while (true) {
if (distance > safeDistance) {
Serial.print("No obstacle detected?");
setForward();
findDistance();
}
else if (distance < safeDistance) {
goto stop;
}
}
stop:
stop();
Serial.print("Obstacle detected?");
}
/* When voice input is "Backward" */
void voicebackward() {
backward();
delay(1500);
stop();
}
/* When voice input is "Left" */
void voiceLeft() {
ultrasonicServo.write(180);
delay(100);
findDistance();
delay(200);
ultrasonicServo.write(90);
delay(100);
if (distance > safeDistance) {
Serial.print("No obstacle detected?");
setBackward();
delay(200);
setLeft();
}
while (true) {
if (distance > safeDistance) {
setForward();
findDistance();
}
else if (distance < safeDistance) {
goto stop;
}
}
stop:
stop();
Serial.print("Obstacle detected?");
}
/* When voice input is "Right" */
void voiceRight() {
ultrasonicServo.write(0);
delay(100);
findDistance();
delay(200);
ultrasonicServo.write(90);
delay(100);
if (distance > safeDistance) {
Serial.print("No obstacle detected?");
setBackward();
delay(200);
setRight();
}
while (true) {
if (distance > safeDistance) {
setForward();
findDistance();
}
else if (distance < safeDistance) {
goto stop;
}
}
stop:
stop();
Serial.print("Obstacle detected?");
}
/* Calculating distance measured by ultrasonic sensor */
void findDistance() {
digitalWrite(trigger, LOW);
delayMicroseconds(2);
digitalWrite(trigger, HIGH);
delayMicroseconds(10);
digitalWrite(trigger, LOW);
duration = pulseIn(echo, HIGH);
distance = (duration / 2) * 0.0343;
}
/* Forward movement */
void forward() {
modeChange();
delay(100);
if (flag == 1) {
digitalWrite(motorMovement_1, HIGH);
digitalWrite(motorMovement_2, LOW);
digitalWrite(motorDirection_1, LOW);
digitalWrite(motorDirection_2, LOW);
}
}
/* Forward movement for auto and voice modes*/
void setForward() {
modeChange();
delay(100);
if (flag == 1) {
SoftPWMSet(motorMovement_pwm, 180);
digitalWrite(motorMovement_1, HIGH);
digitalWrite(motorMovement_2, LOW);
digitalWrite(motorDirection_1, LOW);
digitalWrite(motorDirection_2, LOW);
}
}
/* Backward movement */
void backward() {
modeChange();
delay(100);
if (flag == 1) {
digitalWrite(motorMovement_1, LOW);
digitalWrite(motorMovement_2, HIGH);
digitalWrite(motorDirection_1, LOW);
digitalWrite(motorDirection_2, LOW);
}
}
/* Backward movement for auto and voice modes*/
void setBackward() {
modeChange();
delay(100);
if (flag == 1) {
SoftPWMSet(motorMovement_pwm, 160);
Serial.print("Backward?");
digitalWrite(motorMovement_1, LOW);
digitalWrite(motorMovement_2, HIGH);
digitalWrite(motorDirection_1, LOW);
digitalWrite(motorDirection_2, LOW);
delay(700);
stop();
}
}
/* Left movement */
void left() {
modeChange();
delay(100);
if (flag == 1) {
digitalWrite(motorMovement_1, HIGH);
digitalWrite(motorMovement_2, LOW);
digitalWrite(motorDirection_1, HIGH);
digitalWrite(motorDirection_2, LOW);
}
}
/* Left movement for auto and voice modes*/
void setLeft() {
modeChange();
delay(100);
if (flag == 1) {
SoftPWMSet(motorMovement_pwm, 150);
Serial.print("Left?");
digitalWrite(motorMovement_1, HIGH);
digitalWrite(motorMovement_2, LOW);
digitalWrite(motorDirection_1, HIGH);
digitalWrite(motorDirection_2, LOW);
delay(1500);
}
}
/* Right movement */
void right() {
modeChange();
delay(100);
if (flag == 1) {
digitalWrite(motorMovement_1, HIGH);
digitalWrite(motorMovement_2, LOW);
digitalWrite(motorDirection_1, LOW);
digitalWrite(motorDirection_2, HIGH);
}
}
/* Right movement for auto and voice modes*/
void setRight() {
modeChange();
delay(100);
if (flag == 1) {
SoftPWMSet(motorMovement_pwm, 150);
Serial.print("Right?");
digitalWrite(motorMovement_1, HIGH);
digitalWrite(motorMovement_2, LOW);
digitalWrite(motorDirection_1, LOW);
digitalWrite(motorDirection_2, HIGH);
delay(1500);
}
}
/* Stopping robot */
void stop() {
modeChange();
delay(100);
if (flag == 1) {
digitalWrite(motorMovement_1, LOW);
digitalWrite(motorMovement_2, LOW);
digitalWrite(motorDirection_1, LOW);
digitalWrite(motorDirection_2, LOW);
ultrasonicServo.write(90);
}
}
/* Change speed of motors */
void pwmChange() {
if (input == 'X')
pwm = 150;
else if (input == 'Y')
pwm = 100;
else if (input == 'Z')
pwm = 50;
SoftPWMSet(motorMovement_pwm, pwm);
}




